Robô-preguiça monitora ambiente no ritmo da natureza
Robô-preguiça monitora ambiente no ritmo da natureza
Redação do Site Inovação Tecnológica - 11/06/2019
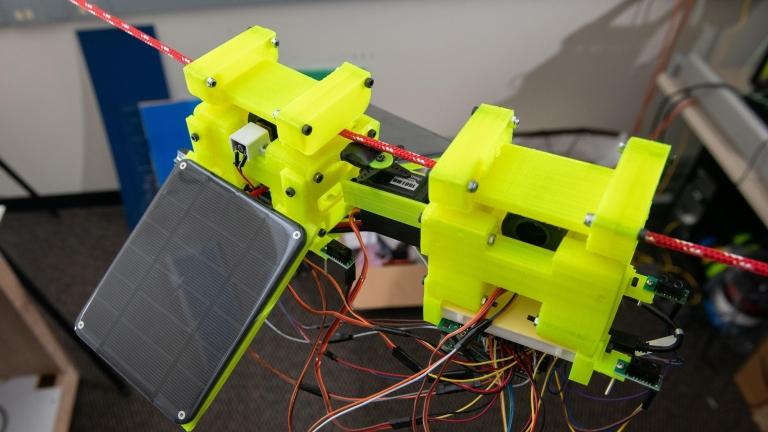
O robô se movimenta por cabos, para cobrir grandes áreas em florestas ou plantações. [Imagem: Allison Carter/Georgia Tech]
Robô-preguiça
Os robôs parecem estar sempre associados com comportamentos do tipo mais rápido, mais ágil, mais forte, e por aí vai.
Mas, na natureza, nada é tão apressado. Assim, monitorar o meio ambiente é um trabalho mais adequado para robôs que se mostrem persistentes, de movimento suave, silenciosos, e por aí vai.
Foi pensando nisso que um trio de roboticistas do Instituto de Tecnologia da Geórgia, nos EUA, criou um "robô-preguiça".
Suspenso em uma rede de cabos, para cobrir grandes áreas, o robô só se move para coletar dados quando detecta variações ambientais, como mudanças no tempo ou na composição química da atmosfera.
Ou pode ser programado para rastejar lentamente pelos cabos, como o bicho preguiça que lhe dá nome, sem assustar os moradores da área, que ele pode estar tentando observar.
Além de seguir o ritmo da natureza, o fato de não ficar se agitando o tempo todo sem necessidade significa que o robô gasta pouquíssima energia. A energia é suprida por baterias, recarregadas por um pequeno painel fotovoltaico, o que permite que o robô fique no ambiente por longos períodos de tempo sem precisar de manutenção.
Robô com movimento por cabos
A construção do robô-preguiça é simples, com todas as peças estruturais feitas em uma impressora 3D.
Mas o movimento em uma rede de cabos espalhada por uma floresta deu trabalho.

Preguiça nativa movendo-se pelo sistema de cabos onde o robô será testado. [Imagem: M. Zachariah Peery]
"O desafio é se segurar suavemente em um cabo enquanto agarra outro. É uma manobra complicada e você tem que fazer certo para fornecer uma transição à prova de falhas. Certificar-se de que os interruptores funcionem bem durante longos períodos de tempo é realmente o maior desafio," contou o pesquisador Gennaro Notomista.
Mecanicamente, o robô-preguiça consiste em dois corpos conectados por uma dobradiça controlada eletricamente. Cada corpo abriga um motor de acionamento, conectado a um aro com um pneu. O uso de rodas para locomoção, como nos teleféricos, é simples, eficiente em termos de energia e mais seguro do que outros tipos de locomoção estudados, diz a equipe.
Robô para observar a natureza
"Há muita coisa que não sabemos sobre o que realmente acontece sob densas áreas cobertas de árvores," explicou o pesquisador Magnus Egerstedt. "Na maioria das vezes, o SlothBot vai ficar pendurado por lá e, de vez em quando, ele vai se mover para um ponto ensolarado para recarregar a bateria."
Os primeiros testes em ambiente real serão feitos em uma plantação de cacau na Costa Rica, onde já há uma população de bichos-preguiça de verdade e um sistema de cabos pronto.
"Os cabos usados para mover o cacau tornaram-se uma autoestrada para as preguiças porque os animais os acham úteis para se movimentar," contou Egerstedt. "Se tudo correr bem, vamos instalar os SlothBots ao longo dos cabos para monitorar as preguiças."
Bibliografia:
The SlothBot: A Novel Design for a Wire-Traversing Robot
Gennaro Notomista, Yousef Emam, Magnus Egerstedt
IEEE Robotics and Automation Letters
Vol.: 4 Issue: 2
DOI: 10.1109/LRA.2019.2899593
The SlothBot: A Novel Design for a Wire-Traversing Robot
Gennaro Notomista, Yousef Emam, Magnus Egerstedt
IEEE Robotics and Automation Letters
Vol.: 4 Issue: 2
DOI: 10.1109/LRA.2019.2899593

Comentários
Postar um comentário
O sábio basta a si mesmo