Mão robótica mescla intenção do usuário com inteligência artificial
Mão robótica mescla intenção do usuário com inteligência artificial
Redação do Site Inovação Tecnológica - 23/09/2019

Versão do equipamento usada para aprimorar os algoritmos de inteligência artificial.
[Imagem: EPFL/Alain Herzog]
[Imagem: EPFL/Alain Herzog]
Tecnologia neuroprotética
Engenheiros suíços começaram a testar uma nova tecnologia neuroprotética que combina o controle robótico com o controle voluntário dos usuários.
Eles estão desenvolvendo novas abordagens para o controle aprimorado das mãos robóticas - em particular para amputados - que combinam o controle individual dos dedos e a automação para melhorar a pegada e a manipulação dos objetos.
A tecnologia mescla dois conceitos de dois campos diferentes. A implementação simultânea de ambos nunca havia sido feita antes para o controle de mãos robóticas.
O primeiro conceito, da neuroengenharia, envolve decifrar o movimento pretendido dos dedos a partir da atividade muscular no coto do amputado, e então usar esses sinais para o controle individual dos dedos da mão protética - o detalhe é o controle dos dedos individualmente, algo que nunca foi feito antes. O outro conceito, da robótica, permite que a mão artificial ajude a segurar objetos e mantenha contato com eles para agarrar com robustez.
"Quando você segura um objeto em sua mão e ele começa a escorregar, você tem apenas alguns milissegundos para reagir," explica Aude Billard, pesquisador da Escola Politécnica Federal de Lausanne (EPFL). "A mão robótica tem a capacidade de reagir em 400 milissegundos. Equipada com sensores de pressão ao longo dos dedos, ela pode reagir e estabilizar o objeto antes que o cérebro possa perceber que o objeto está escorregando."

Demonstração dos sensores para leitura das intenções de movimento, feita por um indivíduo saudável.
[Imagem: EPFL/Alain Herzog]
[Imagem: EPFL/Alain Herzog]
Intenção real com inteligência artificial
Para detectar as intenções de movimento do usuário e controlar o equipamento em tempo real, o sistema usa um algoritmo de inteligência artificial, que primeiro aprende como decodificar a intenção do usuário e então traduz isso no movimento de cada dedo da mão protética.
Para isso, o usuário deve executar uma série de movimentos das mãos para treinar o algoritmo, que usa aprendizado de máquina. Os sensores colocados na superfície do braço - em comparação com a coleta invasiva feita diretamente nos nervos - detectam a atividade muscular e o algoritmo descobre quais movimentos da mão correspondem a quais padrões de atividade muscular.
Uma vez que os movimentos dos dedos pretendidos pelo usuário sejam entendidos, essas informações podem ser usadas para controlar os dedos individualmente.
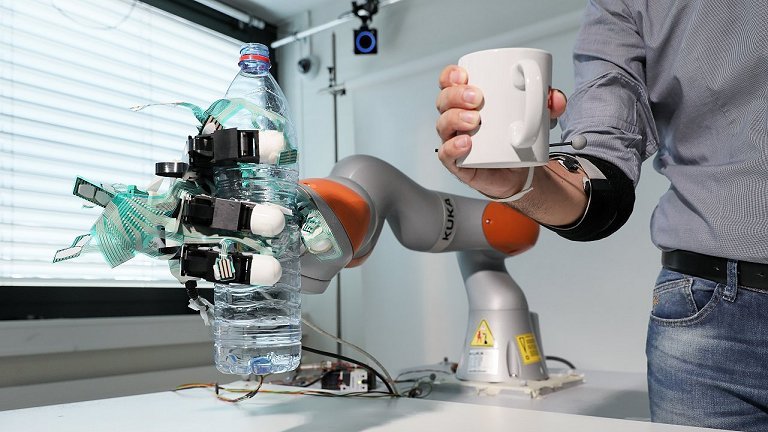
Um robô está sendo usado para treinar o algoritmo de inteligência artificial com uma ampla gama de objetos.
[Imagem: EPFL/Alain Herzog]
[Imagem: EPFL/Alain Herzog]
Treinamento robotizado
A primeira prova de conceito mesclando neuroengenharia e robótica foi testada com sucesso em três amputados e em sete indivíduos saudáveis.
Contudo, ainda há desafios a serem vencidos para melhorar o algoritmo, antes que ele possa ser implementado em uma mão protética disponível comercialmente. Para acelerar nesse processo, o algoritmo está sendo testado em um robô, que pode executar milhares de movimentos repetidos sem se cansar, provendo o treinamento adequado para a mão robótica com uma grande variedade de tipos de objetos.
Bibliografia:
Artigo: Shared human-robot proportional control of a dexterous myoelectric prosthesis
Autores: Katie Z. Zhuang, Nicolas Sommer, Vincent Mendez, Saurav Aryan, Emanuele Formento, Edoardo D’Anna, Fiorenzo Artoni, Francesco Petrini, Giuseppe Granata, Giovanni Cannaviello, Wassim Raffoul, Aude Billard, Silvestro Micera
Revista: Nature Machine Intelligence
Vol.: 1, pages 400-411
DOI: 10.1038/s42256-019-0093-5
Artigo: Shared human-robot proportional control of a dexterous myoelectric prosthesis
Autores: Katie Z. Zhuang, Nicolas Sommer, Vincent Mendez, Saurav Aryan, Emanuele Formento, Edoardo D’Anna, Fiorenzo Artoni, Francesco Petrini, Giuseppe Granata, Giovanni Cannaviello, Wassim Raffoul, Aude Billard, Silvestro Micera
Revista: Nature Machine Intelligence
Vol.: 1, pages 400-411
DOI: 10.1038/s42256-019-0093-5

Comentários
Postar um comentário
O sábio basta a si mesmo