Sistema de percepção robótica imita sensações humanas
Sistema de percepção robótica imita sensações humanas
Redação do Site Inovação Tecnológica - 11/03/2019

Este dedo robótico bioinspirado fornece informações hápticas e de movimento. [Imagem: UCSD]
Robótica macia
Uma equipe de pesquisadores da Itália e dos EUA desenvolveu um sistema de percepção para robôs macios inspirado no modo como os humanos processam informações sobre seus próprios corpos no espaço e em relação a outros objetos e pessoas.
O objetivo final é construir um sistema de percepção robótica que possa prever os movimentos e o estado interno do robô sem depender de sensores externos.
Thomas Thuruthel e seus colegas alcançaram esse objetivo para um dedo robótico macio - a robótica macia refere-se à construção de equipamentos usando não metais e outros materiais duros, mas materiais mais similares aos biológicos.
O resultado tem aplicações em interação homem-robô, na robótica de vestir - exoesqueletos e exorroupas, por exemplo -, bem como em equipamentos médicos flexíveis para corrigir distúrbios que afetam músculos e ossos.
Interpretação de sensações
Thuruthel embutiu arbitrariamente sensores de tensão dentro do dedo robótico, sabendo que eles responderiam a uma grande variedade de movimentos. A diferença é que, em vez de ler os dados de cada sensor, ele usou técnicas de aprendizado de máquina para interpretar os sinais como um todo.
Isso permitiu prever as forças aplicadas ao dedo e os próprios movimentos do dedo, demonstrando que essa abordagem permite desenvolver modelos que possam prever forças e deformações experimentadas por sistemas robóticos à medida que se movem.
Isso é importante porque as técnicas tradicionalmente usadas na robótica para processar dados de sensores não conseguem capturar as complexas deformações de sistemas flexíveis. Além disso, as informações capturadas pelos sensores são igualmente complexas. Como resultado, o projeto, posicionamento e fabricação de sensores em robôs flexíveis são tarefas ainda por vencer. Este trabalho oferece uma solução para esse problema.
"As vantagens da nossa abordagem são a capacidade de prever movimentos complexos e forças que o robô macio experimenta, o que é difícil com os métodos tradicionais, e o fato de que ele pode ser aplicado a vários tipos de atuadores e sensores," disse o professor Michael Tolley, coordenador da equipe. "Nosso método também inclui sensores redundantes, o que melhora a robustez geral de nossas previsões."
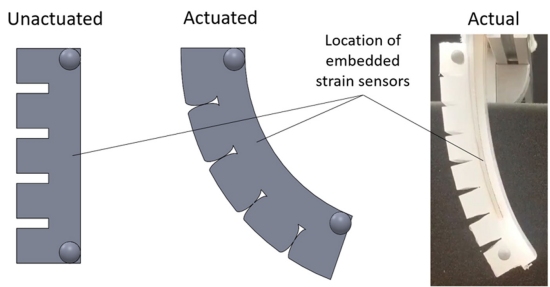
Ainda há sensores, mas eles são distribuídos pelo "tecido robótico". [Imagem: Thomas George Thuruthel et al. - 10.1126/scirobotics.aav1488 ]
Imitação dos sentidos humanos
O sistema de percepção robótica destina-se a imitar os vários componentes necessários para os humanos navegarem em seu ambiente: o sistema de captura de movimento substitui a visão; a rede neural substitui as funções cerebrais; os sensores substituem o toque; e o dedo representa o corpo interagindo com o mundo exterior. Um sistema de captura de movimento é usado para treinar a rede neural, mas pode ser descartado quando o treinamento está completo.
Os próximos passos incluem aumentar o número de sensores, para imitar melhor as capacidades densas de detecção da pele biológica, e fechar o circuito para o controle de realimentação do atuador.
Bibliografia:
Soft robot perception using embedded soft sensors and recurrent neural networks
Thomas George Thuruthel, Benjamin Shih, Cecilia Laschi, Michael Thomas Tolley
Science Robotics
Vol.: 4, Issue 26, eaav1488
Soft robot perception using embedded soft sensors and recurrent neural networks
Thomas George Thuruthel, Benjamin Shih, Cecilia Laschi, Michael Thomas Tolley
Science Robotics
Vol.: 4, Issue 26, eaav1488

Comentários
Postar um comentário
O sábio basta a si mesmo